

clp
VR Controller ConceptDanny Ludwig
Prof. Dr. Fabian Hemmert
Prof. Matthias Schönherr
1 21/22
3
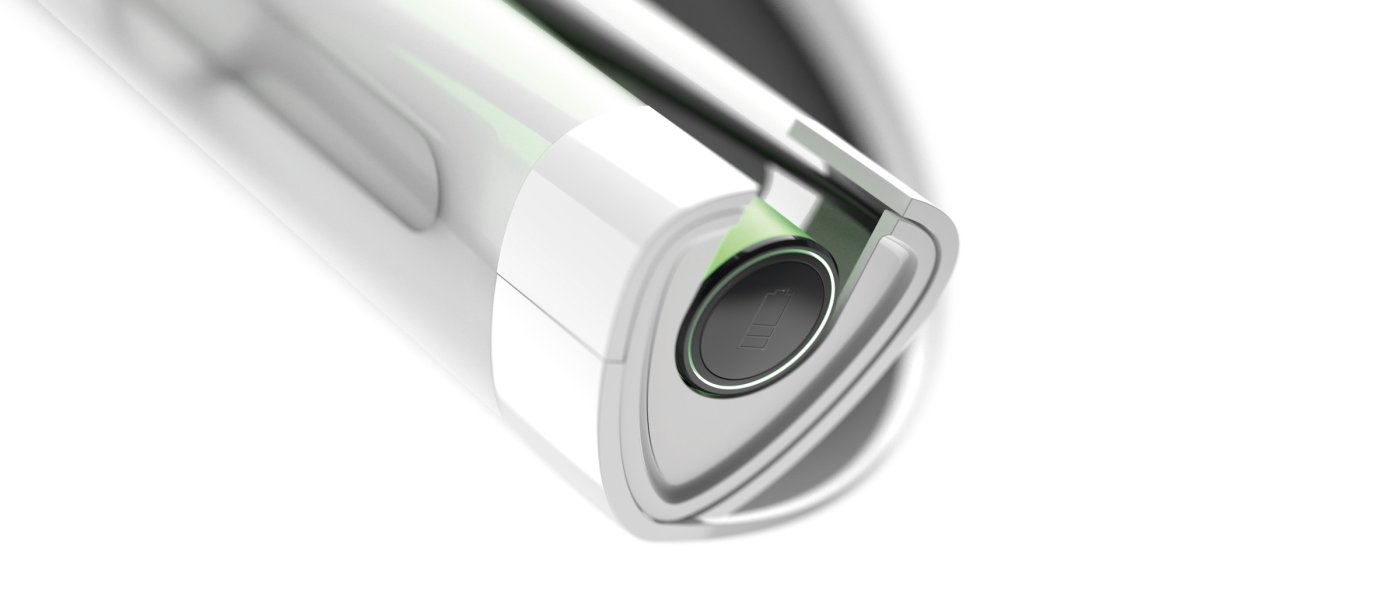
clp is a VR controller concept developed for long-term use and adapted to the needs of a professional target group. The guiding principles were simplicity and lightness: the weight-optimised design reduces signs of exhaustion when working and modelling in virtual space; the intuitive usage concept and a reduced interface make it easy to get started, especially for newcomers.
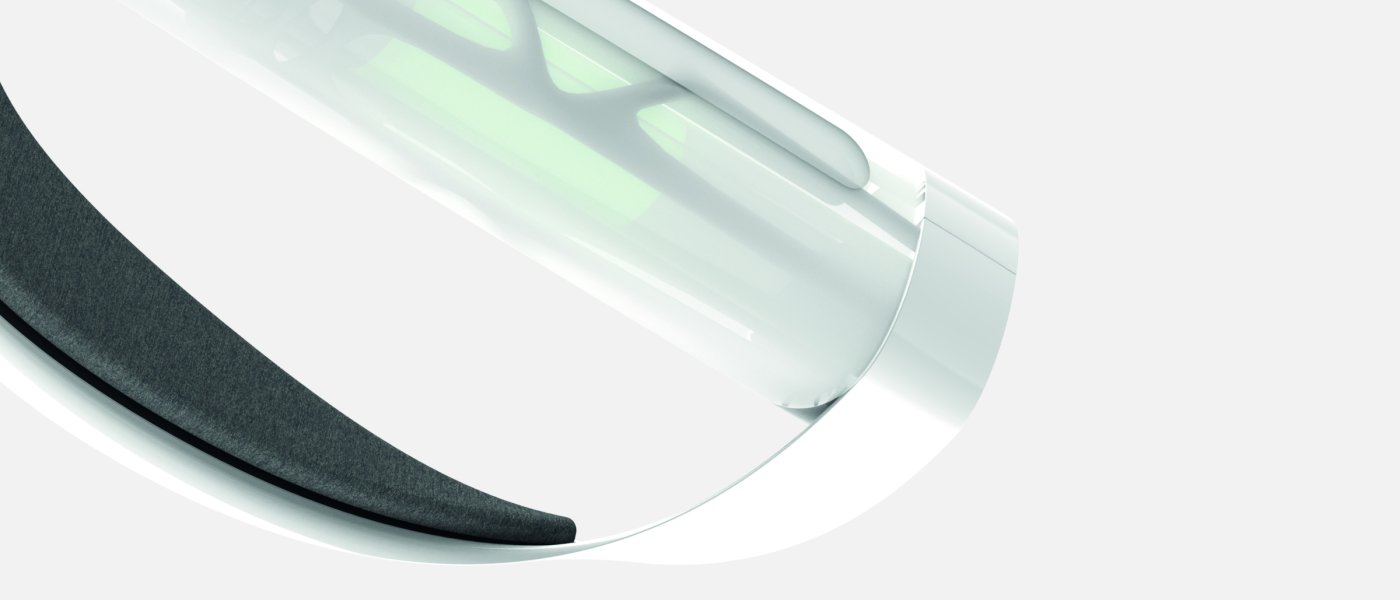
clp is simply pulled over the hand for use. The controller is touch-sensitive all around, buttons on the sides and a joystick on the top allow more precise inputs. The slender, pressure-sensitive body enables gesture control, which provides additional customisation options for more experienced users. To minimise energy-related downtime, the controller is battery-powered.
Lightness also played a decisive role in shape and colour: the topology-optimised inner housing leads to material savings; the milky-transparent outer surface is illuminated by the light from the battery shaft, so that the skeletal pattern of the inner housing is reflected blurrily to the outside.

We respect your privacy!
Click the button to activate the video. Then a connection to YouTube is established.




Torch
Daniel Schulze

yu bn
Ninjee Barsaikhan

CO.BAG
Christina Klöpper
